
The motion of a rigid body, in general, is a combination of rotation and translation. If the body is fixed at a point or along a line, it has only rotational motion. We know that force is needed to change the translational state of a body, i.e. to produce linear acceleration. The rotational analogue of force is the moment of force. It is also referred to as torque.
If a body is capable of rotating about an axis, then force applied properly on this body will rotate it about the axis (axis of rotating). This turning effect of the force about the axis of rotation is called torque.
Torque is the physical quantity which produces angular acceleration in the body.
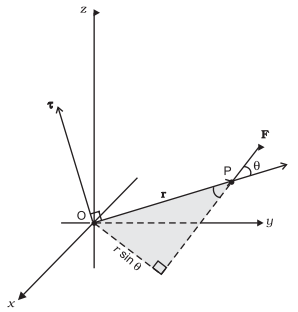
τ = r x F
Torque = the cross-product of displacement r and force F
|τ| = r F sin θ
|τ| = F x r sin θ
But r sin θ = L (momentum arm)
Therefore,
|τ| = F L
Magnitude of Torque = Magnitude of force x Moment Arm
If the line of action of force passes through the axis of rotation then this force cannot produce torque.
Torque → positive if directed outward from paper
Torque → negative if directed inward from paper
The direction of torque can be found by using Right Hand Rule and is always perpendicular to the plane containing r & F. Thus
Clockwise torque → negative
Counter-Clockwise torque → positive
The unit of torque is Nm. Torque is a vector. Moment of force has dimension M L2 T-2. Its dimensions are the same as those of work or energy.